
FC-Spezifikationen
MCU: 100 MHz STM32F411CEU6
IMU: MPU6000 (SPI)
Baro: BMP280 (I2C)
OSD: AT7456E (SPI)
Blackbox : Nein
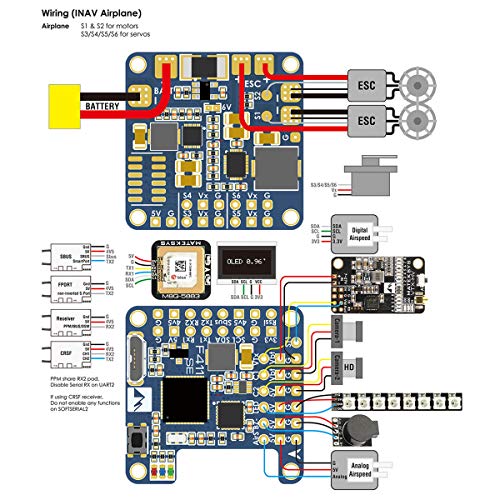
2x Uarts und 2x Softserial-Tx und 2x Motoren, 4x Servoausgänge
1x I2C und 4x ADC (VBAT, Strom, RSSI, AirSpeed)
3x LEDs zugunsten FC STATUS (Hacke, Rot) und 3,3 V-Anzeige (Rot)
Umschaltbare Doppelkameraeingänge
TR/SA VTX-Steuerung: Ja
WS2812 LED-Steuerung: Ja
Piepserausgang: Ja
RSSI: Ja
Spannungsteiler zugunsten analogen Fluggeschwindigkeitssensor: Ja
FC-Firmware
INAV-Finitum: MATEKF411SE
PDB
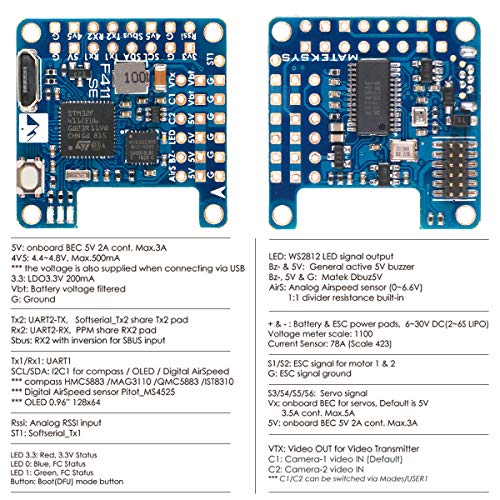
Eingangsspannung Teilbereich: 6~30V (2 ~ 6S LiPo) und 2x ESC Power Pads
Batteriespannungssensor: 1:10 (Skala 1100)
Stromsensor: 78A, 3,3V ADC, Skala 423
BEC 5V-Ausgang
Entwickelt zugunsten Flugsteuerung, Verbraucher, Kamera, Summer, 2812 LED_Strip, Summer, GPS-Modul, AirSpeed-Modul
Dauerstrom: 2A mps, max. 3 A (5 Sekunden / Minute)
BEC Vxoutput
Entwickelt zugunsten Servos
Ereignis einstellbar, 5 V Standard, 6 V-zusätzliche
Dauerstrom: 3,5 A, max. 5 A (5 Sekunden / Minute)
BEC 3,3 V-Ausgang
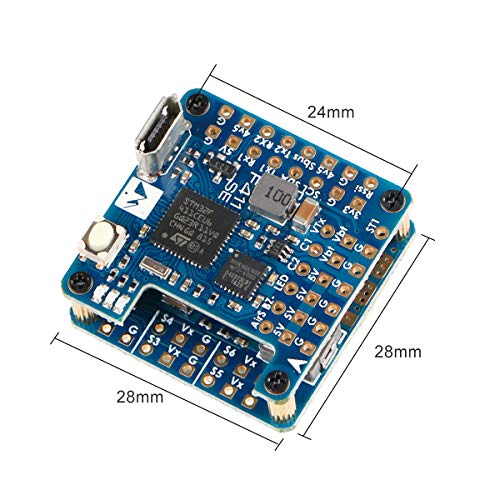
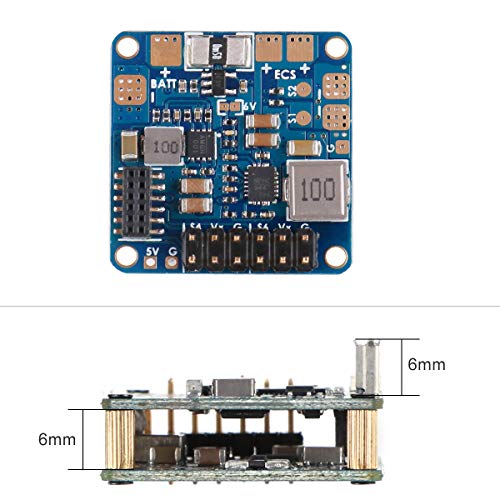
Entwickelt zugunsten Baro/Kompassmodul / OLED und Spektrum RX – Linearregler – Dauerstrom: 200 mA – physikalisch – Montage: 24 x 24 mm, Φ2 mm – Abmessungen: 28 x 28 x 14 mm
Gewicht: 8,5 g
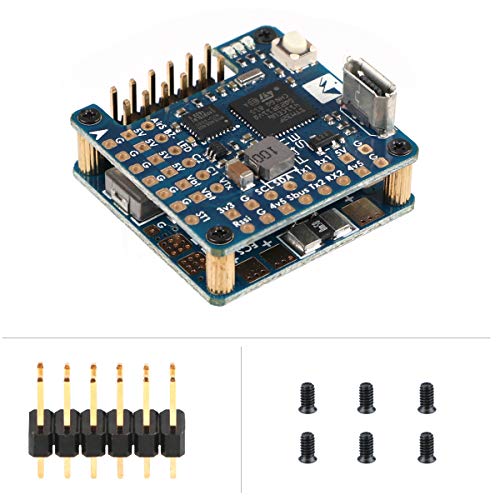
Inklusive
1 * Matek Flugregler F411-WSE
★ Matek Flight Controller F411-WSE: Verbesserter Flight Controller, der speziell zugunsten Starrflügel entwickelt wurde. MCU: 100 MHz STM32F411CEU6; IMU: MPU6000 (SPI); Baro: BMP280 (I2C); OSD: AT7456E (SPI); Umschaltbare zwei Kameraeingänge
★ FC Firmware: INAV Finitum: MATEKF411SE
★ PDB: Eingangsspannungsbereich: 630 V (26 S LiPo); 2x ESC Power Pads; Batteriespannungssensor: 1:10 (Maßstab 1100); Aktueller Senor: 78 A, 3,3V ADC, Skala 423
★ 2x Motoren, 4x Servoausgänge, 3x LEDs zugunsten FC STATUS (Hacke, rot) und 3.3V Anzeige (rot)
★ Ausweichlösung Datensammlung finden Sie betrübt: http://www.mateksys.com/?portfolio=f411-wsetab-id-2




Rezensionen
Es gibt noch keine Rezensionen.